CRANE-X7 高階款(7+1 DOF) ROS / ROS2 機器手臂
CRANE-X7 高階款(7+1 DOF) ROS / ROS2 機器手臂
這是一款標準相容 ROS / ROS2 的研發用機器手臂,它是 CRANE+ V2 的高階機種。緊湊又時尚!是協作機器人研究的理想選擇。附有手提箱,方便攜帶!
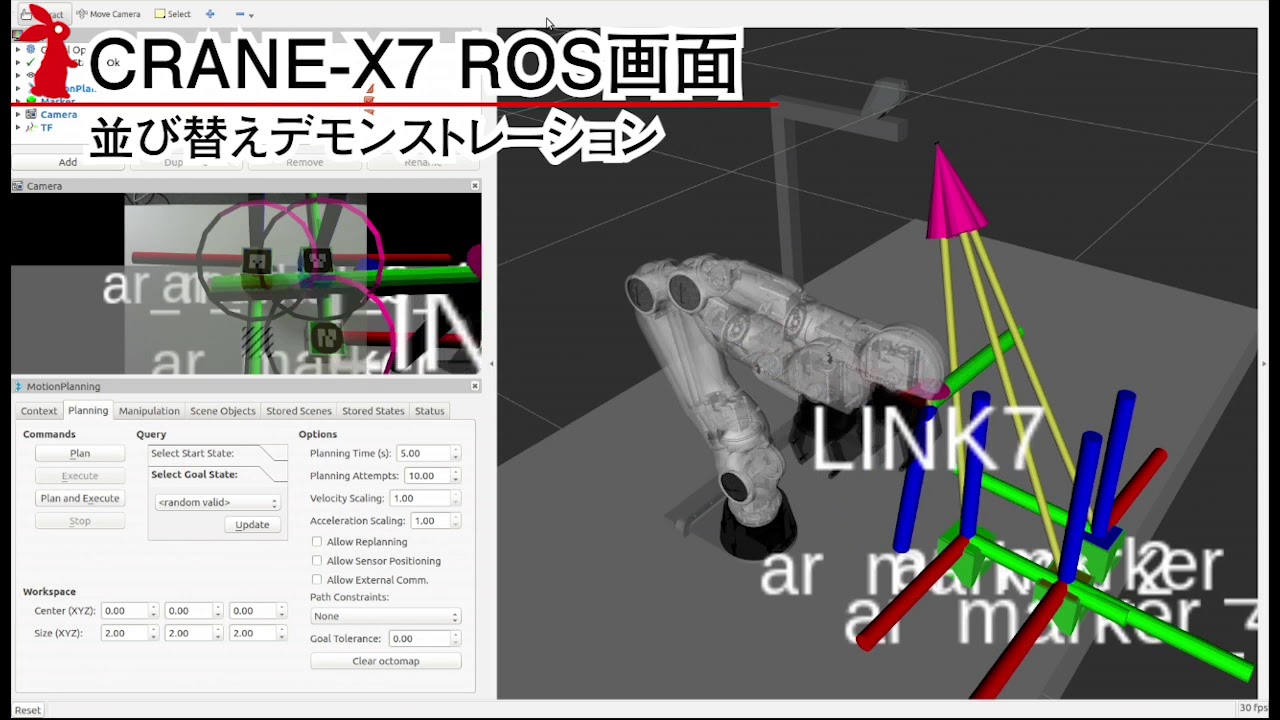
CRANE-X7 是與日本 Osaka University 大阪大學共同開發,它主要是為了研究和開發目的而設計的。因為有 7 軸配置,可以利用其多軸高自由度的優勢,來制定手臂移動方案以避開障礙物,並進行類似人體手臂的靈活運動。除了使用 C++ 進行 inverse kinematics 逆運動學之外,它還支援 ROS / ROS 2,可使用豐富的 ROS 套件包,滿足研究和開發所需的進階處理。
* ROS(機器人作業系統)是開源軟體,提供套件包和工具來幫助軟體工程師開發機器人應用程式。許多工程師正在進行各種研究,使用 ROS 提供的套件包和工具,可以輕鬆創建出高度通用的程式。
* CRANE-X7 機器手臂也可加裝相機,如 Intel D435 深度相機,但須自備安裝連接件
* 因為手臂外殼是 3D 列印件,因此你可以要求不同顏色的外殼,甚至加印自己公司的 logo,讓 CRANE-X7 成為你公司專屬的機器手臂。
* 交貨期約 1.5-2 個月


CRANE-X7
5 Videos